Another super day in RSOH land. My wife thought it was a noremal RSOH day
so she planned on going to a friend's house after Peter went to bed, so I
invited Jeff over to try and get a peizo rate gyro and an analog Dinsmore compass working with Trippy.
He usually does the connector soldering while I try and figure out how to talk to the particular sensor using the motorobots library.
Six hours later....
We had the gyrocompass working. And it only took this much code:
void
setup_gyro() {
PTAObjectP pta;
ServoObjectP servo;
/*
* Configure TPU channel #3 to generate a 1 millisecond pulse
* every 20 milliseconds or so. These are the default settings
* for the servo routines.
*/
servo = servo_init(3);
servo_powered(servo,TRUE);
/*
* Configure TPU channel #2 to capture the time the input pin is
* low, and call the routine catch_period(time) with that time.
*/
pta = tpu_pta_init(2,MODE2,TCR1,1,&catch_period);
tpu_pta_execute(pta);
}
void
catch_period(uint32 value) {
/*
* Print out the time that TPU pin #2 has been low
*/
printf("%d\n",value);
}
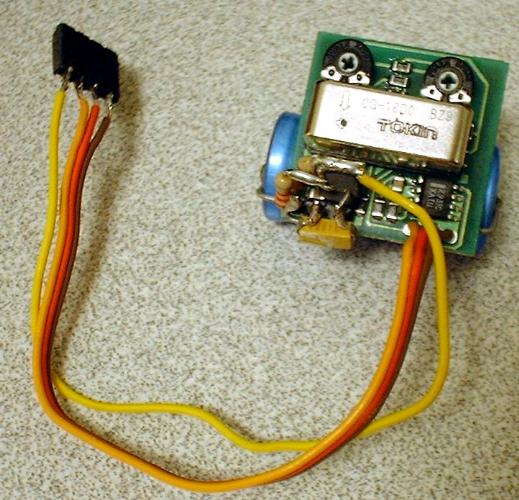
Adding a rate gyro

A peizoelectric rate gyro
from a model helicopter.
|

A Dinsmore analog compass
with long wires.
|

Another shot of the gyro
|
A beautiful 1 millisecond
pulse pretending to be a
model helecopter reciever.
|
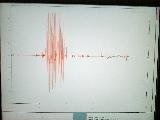
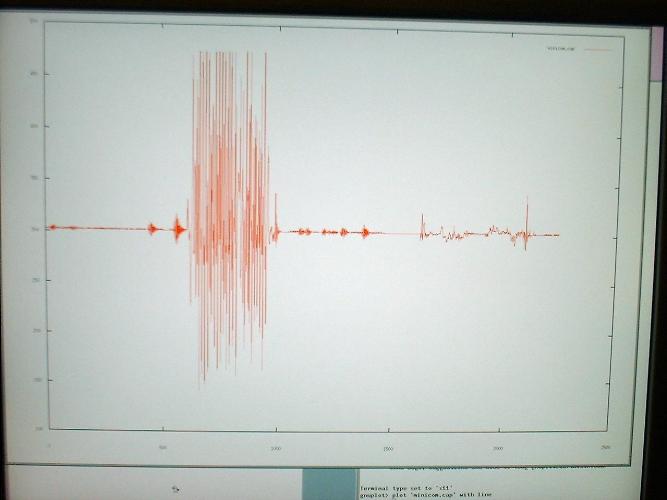
The captured pulse wisths
from the rate gyro after I
shook it around a bit.
|

Gyro and MRM with LCD panel
removed.
|
Back to Index
Back to Alan's home page http://www.pobox.com/~kilian
Back to Jeff's home page http://www.pobox.com/~jsampson
Visit Twin Cities Robotics Group
This page is currently maintained by
Alan Kilian